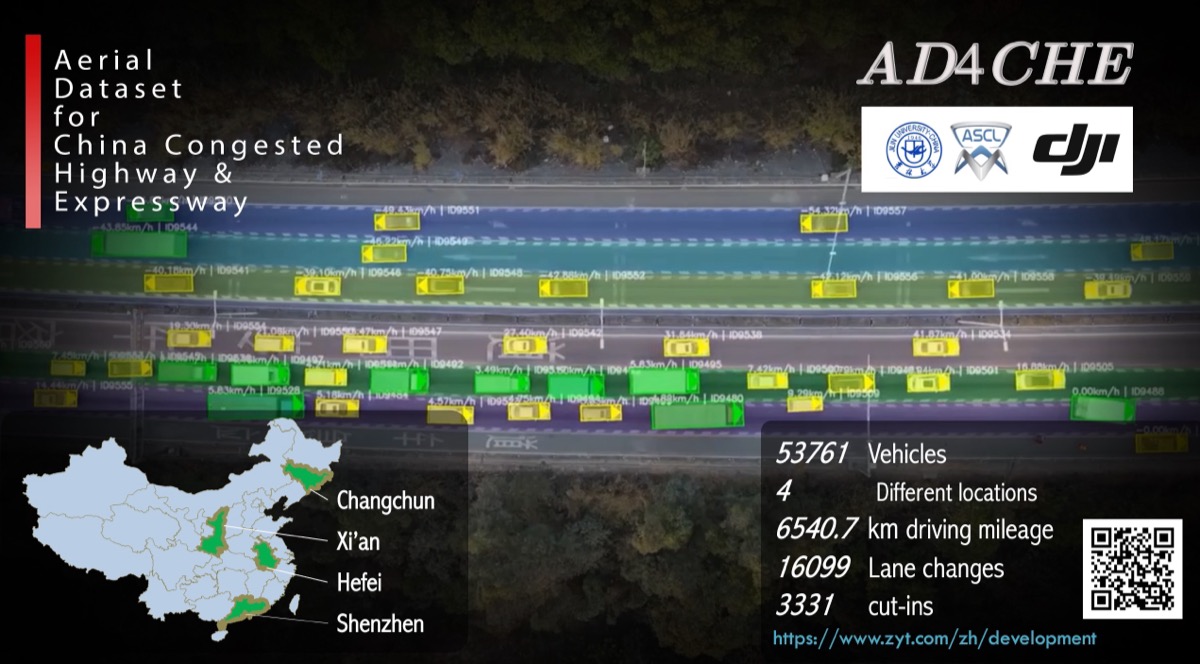
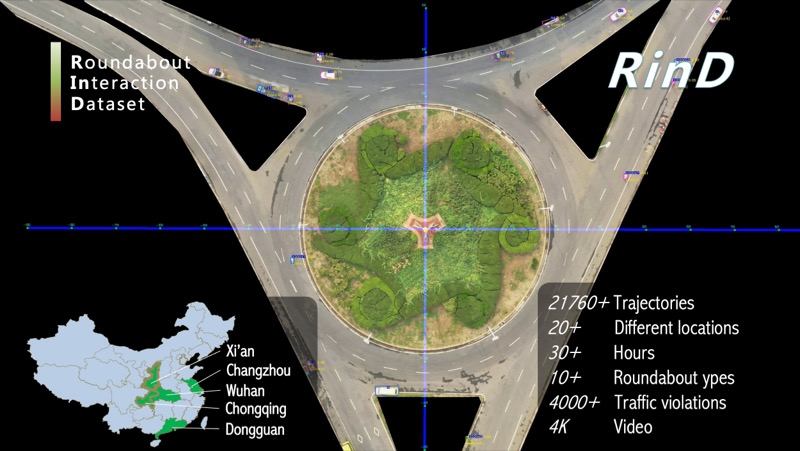
全球规模领先的航测自然驾驶数据集,从鸟瞰视角捕捉真实交通交互行为。
智能驾驶需要两条参考线——一条来自极限,一条来自日常。两条线之间,就是智能驾驶该有的样子。
源自场地测试与法规要求(UN R157、ISO 34502),覆盖极端工况——这是绝对不能突破的硬底线。
源自自然驾驶数据,捕捉千万级驾驶者在99%以上日常场景中的真实行为——定义舒适性和通行效率的软参考。
鸟瞰视角轨迹数据,涵盖完整运动学参数,支持ISO 34502场景提取。
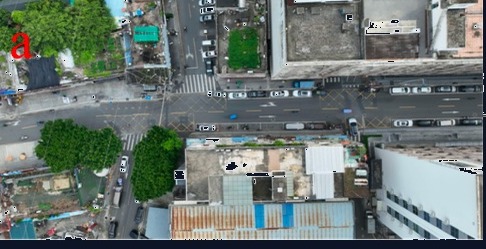
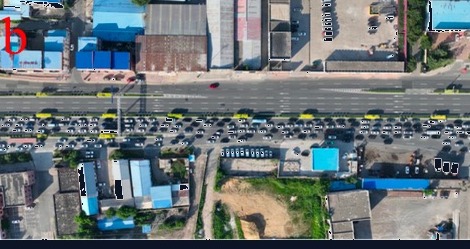







典型城市通勤驾驶旅程——我们的数据覆盖从出发到到达的全部场景类型
同一时空、同一交通流。航测数据以低成本、高效率保留多主体交互、遮挡关系与道路几何,让真实驾驶决策从局部轨迹记录扩展为可观察、可对照、可验证的完整上下文。
车端数据受低视角、严重遮挡和信息挖掘不完全影响,容易漏掉驾驶员实际会考虑的关键车辆,导致周围环境信息捕获不完整。
一个答案——自然驾驶数据——五个落地方向。
用数据驱动的阈值替代经验猜测,为ADAS/AD系统设计和参数标定提供依据。
基于千万级轨迹的P25-P75百分位基线,场景差异化、统计有据,而非专家拍脑袋。
用代表性自然驾驶参数(P5-P95)填补现行标准中的量化空白。
自然驾驶数据为"分母",事故数据为"分子",计算真实场景的风险暴露率。
将人类驾驶行为模型部署为车端实时参考系统,持续评估驾驶性能。
驭研科技依托于吉林大学自动驾驶安全联合实验室,主要研究成果源于多个项目的持续研发和投入,包括科研项目(如:自动驾驶汽车关键安全场景数据库开发及利用、基于无人机的低空信息获取技术应用与产业化),以及与大疆车载及卓驭科技开展应用课题(如:自动驾驶系统安全核心标准预研、基于端到端的高级别自动驾驶系统安全分析与评价),相关成果已经在多家主机厂的辅助驾驶系统量产开发中得到应用。